
PanoSim受邀参展台湾2035 E-Mobility
MIH 开放电动车联盟(Mobility In Harmony,MIH)携手PanoSim共同参加了10月20-22日在台北举办的2035 E-Mobility Taiwan(台湾国际智慧移动展)。
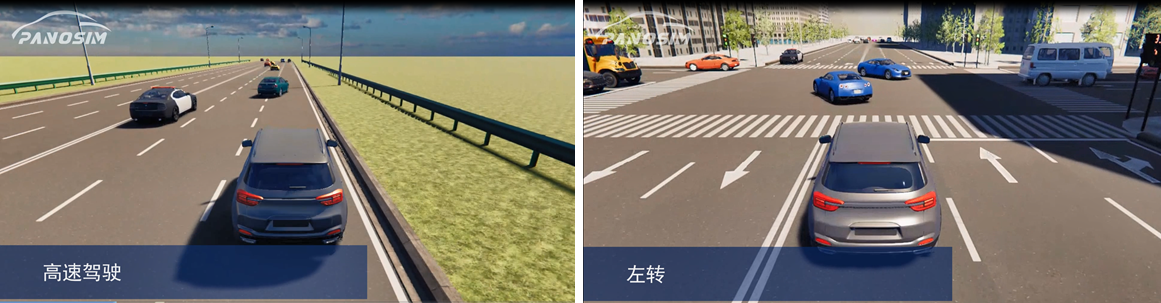
2035 E-Mobility Taiwan以2035年未来世界的移动为概念,完整呈现电动车与自驾车生态系,整合三电系统、IOV、5G、资安、车载娱乐、人车沟通及共享平台等解决方案,向世界展示台湾技术优势。展会现场,PanoSim与MIH共同展示了自动泊车与召车(AVP/Summon)、高速场景驾驶、城市场景驾驶等典型工况的仿真实例,其中,AVP/Summon实例融合了仿真环境下的3600环视、超声波雷达、前视摄像头、毫米波雷达等传感器建模技术,以及自主路径规划、泊车位搜寻、自动泊车控制等仿真技术。

高速场景驾驶及城市工况驾驶实例,PanoSim基于机理和数据驱动的方式,构建干扰交通模型、正常交通流模型、异常交通流模型、中国驾驶特色交通流模型等多元场景,提升极端场景的频率,缩减智能汽车仿真测试时间,降低危险极端场景的安全隐患。
汽车自动驾驶技术以实现安全可靠的自动驾驶为目标,如何保证其安全可靠性是自动驾驶汽车产业落地面临的关键挑战。以物理建模、环境模拟及数值仿真等为核心的计算机模拟仿真技术被广泛地视为汽车智能驾驶高效、安全与可靠性测试验证的重要技术保障。复杂交通场景的模拟仿真技术既是自动驾驶测试的关键技术,也是PanoSim的特色优势。此次PanoSim受邀与MIH携手参展,不仅助力MIH创建开放式电动汽车生态系统,而且向世界自动驾驶行业展示了助力其产业化落地的仿真测试技术和产品。
/ END /
;){kind=link}